Use APKPure App
Get RTAB-Map old version APK for Android
Masa Nyata Pemetaan Rupa Berasaskan
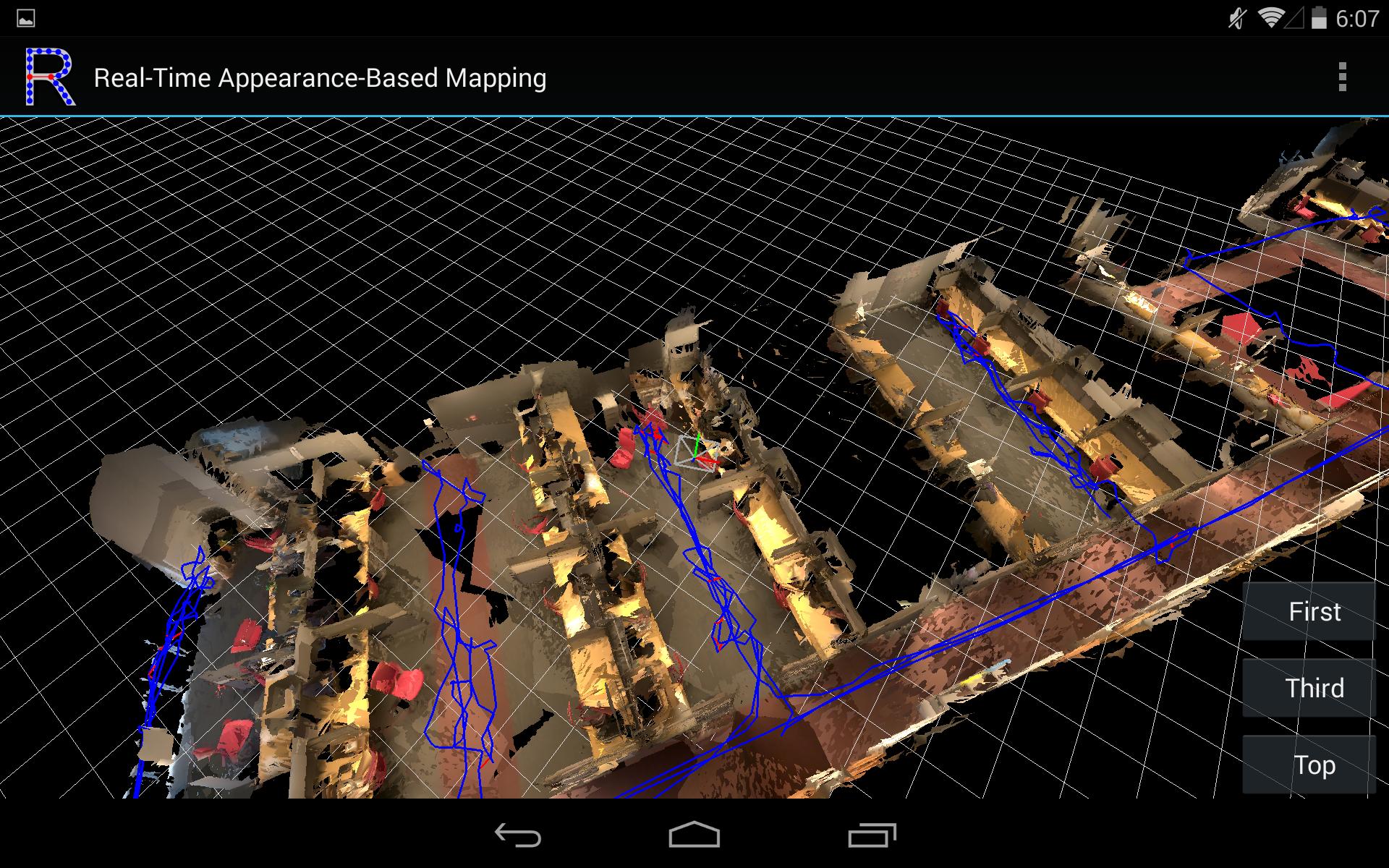
RTAB-Map (Real-Time Rupa Berasaskan Pemetaan) adalah satu pendekatan SLAM Sumber Terbuka RGB-D Graph Berasaskan berdasarkan pengesan penutupan gelung berdasarkan penampilan tambahan. Pengesan penutupan gelung menggunakan pendekatan beg-of-perkataan untuk ditentukan oleh bagaimana mungkin imej baru datang dari lokasi yang sebelum atau lokasi baru. Apabila hipotesis penutupan gelung diterima, kekangan yang baru ditambahkan kepada graf peta, kemudian pengoptimasi Graf mengurangkan kesilapan dalam peta. Pendekatan pengurusan memori digunakan untuk mengehadkan bilangan lokasi yang digunakan untuk pengesanan penutupan gelung dan pengoptimuman suhu, supaya kekangan masa nyata pada environnements besar-besaran sentiasa dihormati.
Model video yang dipaparkan di Sketchfab sini: https://skfb.ly/6nryX
Untuk pertanyaan, tanya di website atau di Github: http://introlab.github.io/rtabmap/#troubleshooting
*** Ia hanya berfungsi pada Project Tango
Ciri-ciri:
* Online 3D pengimbasan / pemetaan alam sekitar
* Pengesanan dan peta penutupan gelung Online pembetulan
* Simpan dalam format DB (RTAB-Map format desktop)
* Eksport di lapis atau OBJ (dengan tekstur sehingga 720p)
* Multi-sesi pemetaan (menyimpan dan terus kemudian)
* Mod Penyetempatan sahaja (dalam sesi sebelumnya)
* Mod trajektori di mana awan titik tidak disimpan (sama dengan Bidang Pembelajaran)
* Pilihan Post-pemprosesan (mis, gunakan Fail Pelarasan untuk menyelaraskan tekstur)
* Ditambah "Seting-> Mapping-> Simpan GPS" pilihan (default dimatikan) untuk menyelamatkan Koordinat GPS di dalam pangkalan data. Melihat isu # 226 pada halaman projek untuk maklumat lanjut.
Last updated on Nov 24, 2016
- Added "Mapping->Append Mode" option (default true): when resuming, a new map is created only after being localized with the old map.
- Updated with RTAB-Map 0.11.11 and Tango Yildun.
- In third-person view, we can now move virtually the camera with two fingers.
- Added Data Recorder Mode under Mapping options. This can be used to record Tango raw data at higher frame rate without actual mapping.
- Added smoothing mesh post-processing option
Versi Terbaru
![]() 0.11.11
0.11.11
Dimuat naik oleh
Melissa Smith
Memerlukan Android
Android 4.2+
Category
Laporkan


Discover what you want easier, faster and safer.

RTAB-Map
0.11.11 by Mathieu Labbé
Oct 24, 2018