下載 APKPure App
可在安卓獲取RTAB-Map的歷史版本
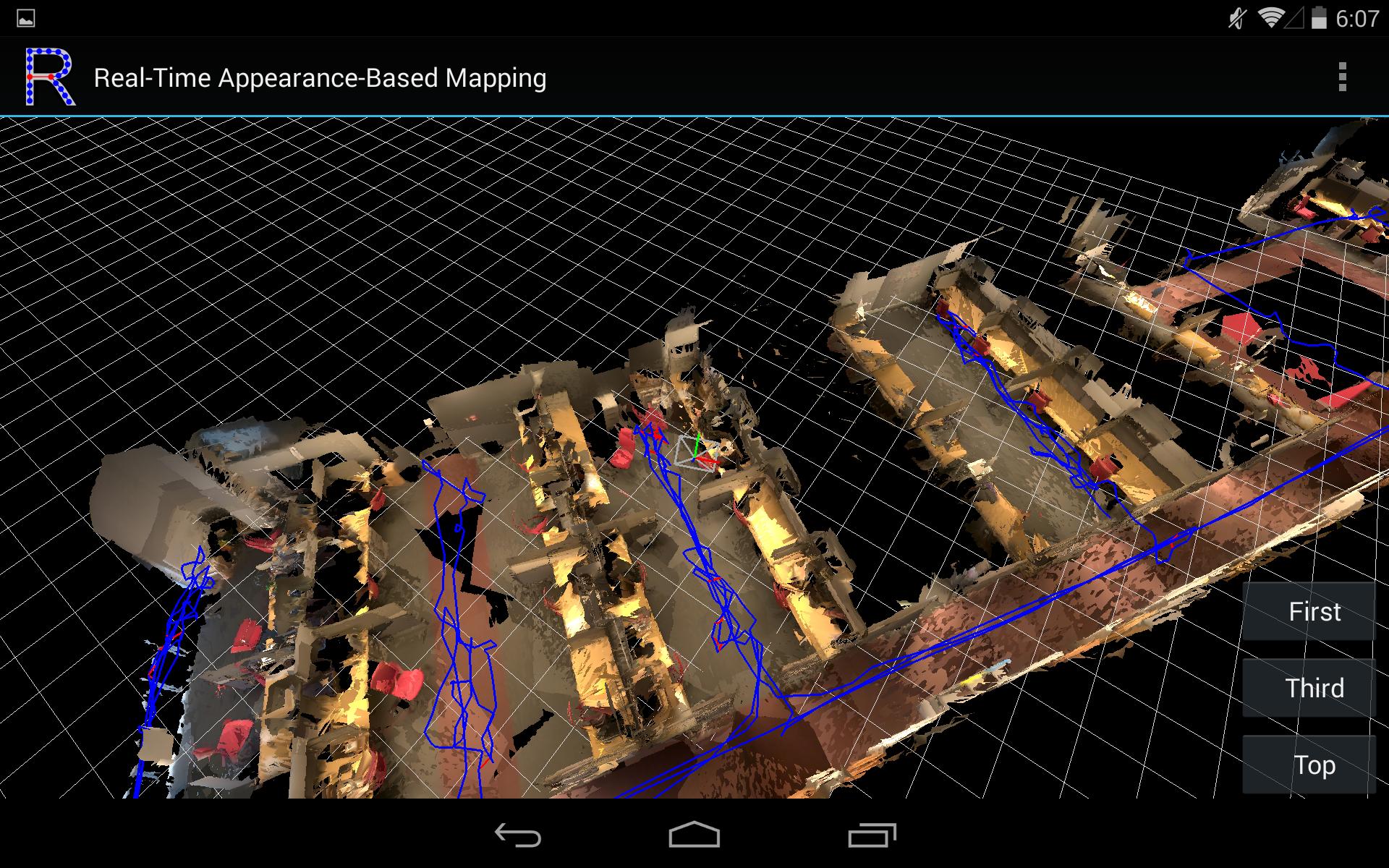
實時外觀為基礎的繪圖
RTAB-MAP(實時外觀基礎映射)是基於增量外觀基礎的環路閉合檢測器上的基於圖形的開源RGB-D SLAM的方法。迴路閉合檢測器使用一袋字的方法來確定的新形象如何可能來自先前的位置或一個新位置。當環路閉合假設被接受,一個新的約束被添加到地圖的圖形,那麼圖形優化的地圖最大限度地減少錯誤。內存管理方法來限制用於環路閉合檢測和圖形優化地點數量,以便在大型environnements實時約束總是尊重。
在Sketchfab的精選影片這裡型號:https://skfb.ly/6nryX
如有問題,請在論壇上或在Github:http://introlab.github.io/rtabmap/#troubleshooting
***它僅適用於Tango項目
特徵:
*環境的在線3D掃描/製圖
*在線環路閉合檢測和校正地圖
*保存在數據庫格式(RTAB-MAP桌面格式)
*出口在簾布OBJ(帶有紋理高達720p)
*多會話映射(保存並在以後繼續)
*只有本地化模式(在先前的session)
*軌跡模式,點雲,不保存(類似於地區學習)
*後處理選項(例如,使用光束法平差對齊紋理)
*新增“設置 - > Mapping->保存GPS”選項(默認禁用),以節省GPS數據庫中的坐標。參見項目網頁上的問題#226獲取更多信息。
Last updated on 2016年11月24日
- Added "Mapping->Append Mode" option (default true): when resuming, a new map is created only after being localized with the old map.
- Updated with RTAB-Map 0.11.11 and Tango Yildun.
- In third-person view, we can now move virtually the camera with two fingers.
- Added Data Recorder Mode under Mapping options. This can be used to record Tango raw data at higher frame rate without actual mapping.
- Added smoothing mesh post-processing option



RTAB-Map
0.11.11 by Mathieu Labbé
2018年10月24日